Modeling and control of biological systems, a brief overview of my interests.
My scientific interests lie in a wide range of mathematical modeling using ODEs. I approach modeling systems from the perspective of a control problem, assess the sensitivity of parameters of a model, and evaluated the stability of critical points in the state space. Some of my previous efforts leverage large data sets in order to fit the model or inform choices. This approach has led to improvement upon previous modeling efforts, and has been applicable to a wide range of scientific inquiry.
My main experience is mathematical modeling, primarily with ODEs. I've published on modeling metabolism, opinion formation models, traffic models, and epidemiological models, like the SEIR model.
My main experience is mathematical modeling, primarily with ODEs. I've published on modeling metabolism, opinion formation models, traffic models, and epidemiological models, like the SEIR model.
Compartmental models and Linear In Flux Expressions

A framework for metabolic models to be used for early phase drug discovery, named Linear-In-Flux-Expressions (LIFE), due to the way the system was written; linearity with respect to the flux is required, but not with respect to metabolite levels.
This research was developed with collaborators from a pharmaceutical company called Sanofi. Later we used this formulation in a collaboration with the Bill and Melinda Gates foundation to investigate tuberculosis treatments.
This research was developed with collaborators from a pharmaceutical company called Sanofi. Later we used this formulation in a collaboration with the Bill and Melinda Gates foundation to investigate tuberculosis treatments.
Opinion Formation and Consensus models
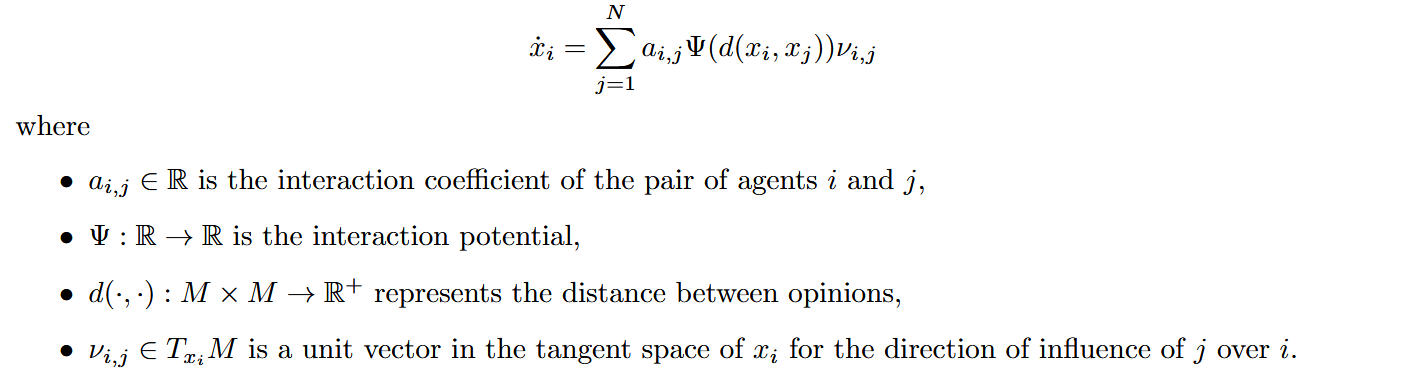
Opinion formation models capture how some agents or opinions may be influenced by other opinions. A weight for each pair of opinions is applied to these interactions, called an interaction coefficient, and we can study the evolution of a system based on these coefficients. Some special states of interest, such as one large cluster where all opinions converge to the same point (called consensus) may occur; on a sphere there are other special states, such as 1. constant movement of agents where the distance between agents does not change, or 2. two clusters of agents at antipodal points.

Left and Center: Simulations where distance between agents is constant as agents move around a 2-sphere. The beginning of the simulation included a phase where the agents organized into positions where the attraction of some and repulsion of others balanced before they began moving in this pattern.
Right: All agents have clustered at one of two antipodal points (farthest apart on the sphere).
Right: All agents have clustered at one of two antipodal points (farthest apart on the sphere).
Modeling the spread of covid with SEIR models
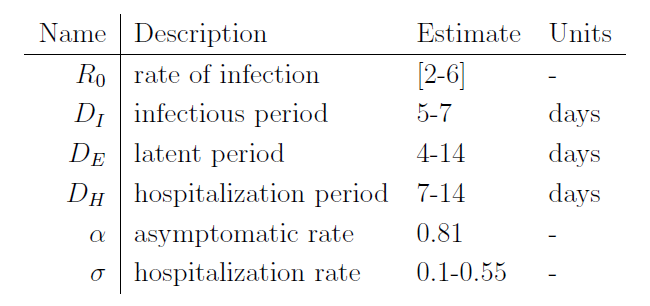
I aided the design and work on an augmented SEIR (S=susceptible, E=exposed, I=infected, R=recovered) type model with extra compartments to represent the special cases of infected individuals during the COVID-19 pandemic. This disease and our response to it suggested the inclusion of compartments for quarantining individuals (both infected and susceptible), as well as two types of infected. Asymptomatic and symptomatic infected individuals are a significant part of how the virus spread across the world, and so we included these in our models

|
Opinion Formation models
|
This model was used to anticipate how much the COVID pandemic would affect hospitals in NJ regarding their ability to give a bed to all the sick. We estimated how many infected would exceed available hospital beds by county in NJ based on lockdown policies (little to no restriction, moderate action, strong action).

Traffic Experiments
The CIRCLES consortium has been a success for performing large scale experiments on the real world
highway. Being on the leadership team and the main experimental scenarios designer, I will continue to collaborate with UC Berkeley, Rutgers, Temple, and Vanderbilt.
This collaboration represents the combination of practical application with theoretical controller design. Our current controllers that are installed on the cars in the large experiment does utilize some highway traffic information downstream. In the future, we are planning how we can better leverage this and other information in following experiments, such as each control vehicle sending data to each other in real time. With our current vehicles and hardware this is not possible. This is expected to change in the near future.
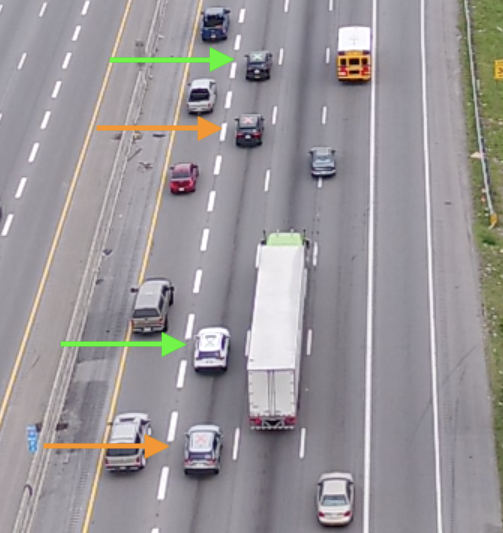
Arrows point to our vehicles with custom cruise control installed; these cars smooth "stop and go" traffic waves.
I have recently participated in the largest live traffic control experiment in history.
More information is here: https://stories.camden.rutgers.edu/driving-innovation/index.html
A time laps of our launch of the 100 car experiment can be seen here:
https://www.youtube.com/watch?v=CGL6vABEU3s&ab_channel=RyanWeightman
highway. Being on the leadership team and the main experimental scenarios designer, I will continue to collaborate with UC Berkeley, Rutgers, Temple, and Vanderbilt.
This collaboration represents the combination of practical application with theoretical controller design. Our current controllers that are installed on the cars in the large experiment does utilize some highway traffic information downstream. In the future, we are planning how we can better leverage this and other information in following experiments, such as each control vehicle sending data to each other in real time. With our current vehicles and hardware this is not possible. This is expected to change in the near future.
Arrows point to our vehicles with custom cruise control installed; these cars smooth "stop and go" traffic waves.
I have recently participated in the largest live traffic control experiment in history.
More information is here: https://stories.camden.rutgers.edu/driving-innovation/index.html
A time laps of our launch of the 100 car experiment can be seen here:
https://www.youtube.com/watch?v=CGL6vABEU3s&ab_channel=RyanWeightman
